■『海のはくぶつかん』1997年9月号

水棲動物の泳ぎ方と水中機械生物
加藤 直三
水棲動物の運動から学ぶ
地球には海、川、湖沼の中で生きる数万種におよぶ動物たちの世界があります。かれらは何億年もの悠久の歴史を生きぬいてきて、それぞれの環境のもとで色々な運動形態を持っています。私の研究室は、10年ほど水中ロボットの研究を行ってきましたが、最近、水棲動物の持つ色々な遊泳機能を観察することで、その機能を水中ロボットに取り入れる研究を行っています。水中ロボットの歴史はわずか30年ほどしかなく、水棲動物たちの歴史から見れば、一瞬の出来事にしかすぎません。それだけ、水棲動物たちの持つ色々な機能から学ぶことは多いのです。
水棲動物の泳ぎ方の多様性
水棲動物の泳ぎ方には多くの種類があります。大きさがミクロン単位のプランクトンやバクテリアなどの鞭毛の蛇行運動、クラゲ、タコ、イカなどの水をうしろに吐き出して進むジェット推進、ウナギやウミヘビなどの細長い体全体をくねらせて泳ぐ蛇行運動(図1参照)、アジなどの尾ひれと体後半部を使って泳ぐ尾ひれ蛇行混合運動、ハコフグなど体をほとんど使わず尾びれだけで進む尾ひれ運動、カワハギなど背びれやしりびれの波状運動で進む背びれやしりびれ運動、ハリセンボンやホウボウなど胸びれを主に用いて運動する胸ひれ運動など多くの運動形態があります。それぞれの水棲動物が生息する環境に適応して多くの運動形態が生まれてきたものと思われます。この地球上に3億年以上も前に出現し、7千万年ほど前に絶滅したと考えられていたシーラカンスが1938年に南アフリカで発見されましたが、この足のような胸びれや腹びれは魚類から原始的な両生類への進化を示すもので、運動形態、環境、進化の間の関係の面から興味深いものがあります。

図1 チョウザメの運動
(出典:Hertel,H., Structure-Form-Movement, Reinhold Publishing Corporation,N.Y.(1966))
水棲動物の運動機構の解明の歴史
水棲動物は身近な存在としてその泳ぎ方について多くの人々の関心を集めてきました。古くは紀元前4世紀にギリシャの哲学者アリストテレスによる水棲動物の運動の記述が残されています。その後、主に動物学者による研究が続きます。18世紀に入り粘性を無視した理想流体の流体力学が誕生し、19世紀中期に至って実際の粘性をもつ粘性流体力学が提案され、今世紀前半にいわゆる近代流体力学が体系化されました。それを受けて、水棲動物の運動機構に流体力学者も関心を持つようになりました。
その研究で大きな影響を及ぼしたのがイギリスのケンブリッジ大学の動物学科の教授であったグレイで、1930年代から動物生態学と力学を包含した研究を展開しました。彼が今日の生物工学あるいはバイオ・メカニックスと呼ばれる学問分野の先駆者と言えます。図2にグレイが用いた魚の蛇行運動を模擬する実験装置を示します。これを水槽の中に入れ色々な動きをさせ、その流体力学的特性を明らかにしました。ベインブリッジは同大学動物学研究所において1960年代前後に多くの実験的研究を行いました。回転水槽を作り、魚の運動を調べ、実験動物生態学を発展させました。
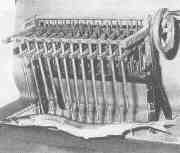
図2 グレイによる魚の蛇行運動を模擬する実験装置
(出典:R.M.Alexander, The History ofFish Mechanics,Fish Biomechanics, edited byP.W.Webb and D.Weihs, Praeger Publishers (1983))
一方、1960年代から水棲動物のみならず鳥をはじめ多くの生物の推進法の理論的な流体力学的体系化を行ったのが、グレイと同じケンブリッジ大学のライトヒル教授です。これによって、水棲動物の泳ぎの効率が定量的に論じられるようになりました。
ケンブリッジの研究からやや遅れて、アメリカでも水棲動物の研究が盛んになってきました。カリフォルニア工科大学のウー教授は、魚の蛇行運動の推進原理を流体力学の面から理論的に研究しました。ミシガン大学のウエッブ教授は、ライトヒル教授の流体力学の理論を取り入れた魚類の筋肉の消費エネルギー推定に関する実験を行い、流体力学と動物生理学の融合を計りました。
日本では、東(あずま)東大名誉教授が鳥、魚、微生物など広い範囲にわたって生物の飛行の流体力学に取り組みました。
水中機械生物
一方、工学の面からこれらの基礎的研究を応用する研究があります。ドイツのベルリン工科大学のヘルテルは1963年に生物学と工学両分野を含んだ著書を出版しました。この中で振動板上に下流へ伝播する進行波運動によって進む振動板推進実験船"TUB-TUB-1"(図3参照)について述べています。これが世界で最初の魚の運動の機械への応用ではないかと思います。
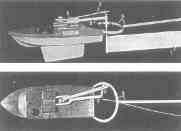
図3 振動板推進実験船TUB-TUB-1
(出典:図1と同じ)
日本では、1970年代から琉球大学の永井教授による尾ひれ運動を行う自動機械魚の精力的な研究があります。一色東京工業大学名誉教授とその門下生森川信州大学助教授は機構的に上下運動と縦揺れ運動を二次元振動翼に与える振動翼推進船の開発を行いました。東海大学海洋科学博物館では、何種類もの水棲動物の推進方法を単純な機械に置き換えた"メカニマル"が展示されています。 最近では、MIT(マサチューセッツ工科大学)のトリアンタフィロ教授らのマグロロボットを用いた尾ひれ蛇行混合運動の研究があります。これは多関節構造であり、尾ひれを含む各パーツの運動が6個のモータとベルト装置により駆動制御されています。この研究の目的は、機械から出る水中での雑音を従来のプロペラ方式より低減させることにあると聞いています。
今年になって、日本で生物学と工学の両面から水棲動物の運動機能や自律システムについて研究を推進する"アクアバイオメカニズム研究会"が組織されました。これまでの先達の研究を受け継ぎ、さらに新しい視点、知見、技術を取り入れて、研究を発展させる目的を持っています。興味をお持ちの方はその研究会の案内がある次のホームページをご覧ください。
http://mackato.os.u-tokai.ac.jp/aquabio.html
胸ひれ運動装置と水中ロボット
私の研究室では、水中ロボットに関して、一定速度でかつ海底からの高さを一定に保って海底ケーブルを検査する母船との間にケーブルを持たない自律型水中ロボットの開発研究(来年から実際に現場で使われます)、母船からケーブルで曳かれながら水中を探査する曳航式水中ロボットの研究、腕を持って海底近くで作業を行う作業型水中ロボットの研究などを行ってきました。
その中で作業型水中ロボットでは、浮遊状態で所定の場所にとどまるためには姿勢をコントロールする必要があります。また腕で物を動かそうとすると反作用で体が動いてしまい制御がさらにむつかしくなります。従来はスクリュー式の推進機を幾つも水中ロボットに付けて位置や姿勢の制御をしていました。しかし、水中ロボットが停止状態で位置や姿勢の制御を行う場合、スクリュー式推進機には正負の推力を迅速に発生するのが難しいという欠点があり、この制御がうまくいかないのが現状です。そこで、この停止状態での姿勢制御を水棲動物ではどのように行っているのか、淡水魚のブラックバスを用いてその泳ぎの観察を行いました。すると図4にあるように胸ひれで水をかいたり(リード・ラグ運動)、付け根を中心にひねったり(フェザリング運動)する動きが、素早い旋回や姿勢の保持に役立っていることを突き止めました。これまで、このような姿勢制御の観点からの水棲動物の運動機構の研究はあまり行われていませんでした。
この胸びれの運動を取り入れた胸びれ運動装置を取り付けた魚型ロボット(図5参照)を開発しました。
 図4 魚の胸ひれの運動
図4 魚の胸ひれの運動
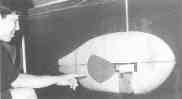 図5 胸ひれ運動装置を装着した魚型ロボット
図5 胸ひれ運動装置を装着した魚型ロボット
試作したロボットは全長1m、幅18cm、高さが35cmの魚型の本体の左右に、厚さ0.6mmのステンレス板で作った胸びれを付けました。一対の胸びれを合計4台のモーターを駆動して動かします。水中で姿勢制御を試みたところ、前後の移動や旋回に加え、急停止や急発進、真横への移動ができることを確認しました。
今後、潮流中でのブラックバスの胸びれの運動の観察にもとづいた潮流中での魚型ロボットの定位置保持と姿勢制御、胸びれ運動装置の腕付き作業型水中ロボットの姿勢制御への適用、水中ロボットが上下方向の移動も可能となる胸びれ運動装置の発展、実際の魚の胸びれの柔らかさを実現化する装置の開発など、研究を続けていく予定です。
研究室のホームページ:http://mackato.os.u-tokai.ac.jp/katolab.html
ご質問は次のアドレスにお願いします。
nkato@kurosio.scc.u-tokai.ac.jp

『海のはくぶつかん』Vol.27, No.5, p.4~6 (所属・肩書は発行当時のもの)
かとう なおみ:東海大学海洋学部船舶工学科教授
最終更新日:1997-11-23(日)
〒424 静岡県清水市三保 2389
東海大学社会教育センター
インターネット活用委員会